
核心技术

车辆线束自动化最优布局方案

输入车辆骨架模型、各个硬件的参考放置区域及车辆空间约束,使用以深度强化学习为基础的智能算法实现各个域内ECU、传感器等关键器件以及域控制器的自动布置设计,在给定硬件要求及车内硬件安装位置约束下,将划分至各个功能域的硬件进行重新整合布置,运用智能优化算法设计电子电气硬件布置方案,实现线束密度、长度优化安排、各控制器芯片算力均衡高效利用、通信能力快速完整实现。
分布式电驱动最优分配控制策略
采用模糊动力学构建考虑模型不确定性的多执行器控制输入解析分解控制算法,实现分布式电驱动的鲁棒最优协同控制,提高分布式电驱动智能车辆行驶稳定及安全性。
提出基于时间触发模型的等价化简算法,构建基于TSN通信协议标准的传输调度机制,保障车载网络中时间敏感数据的实时性和确定性传输为目标。有效的化简调度规模,提升调度性能,为车载网络提供了一个创新性的解决方案。
基于TSN的中央集中式网络架构

TSN时间敏感网络通信技术

车辆传感器系统是智能车辆的重要组成部分,其配置设计在一定程度上决定ADAS系统成本与性能。为此开发一种兼顾设计效率、系统性能需求的环境感知传感器配置设计及线束优化工具将大大简化智能网联车辆的开发进程。
在传感器配置方面,系统布置优化算法中将基于遗传算法对布置方案进行快速迭代,从功能性(配置方案的精度)、经济型(配置方案成本)、可靠性(配置方案工作寿命)三个方面进行综合评价。通过输入车辆三维模型及对应的传感器备选安装位置约束后,即可输出最终优化配置方案。


分布式电驱动最优分配控制验证系统
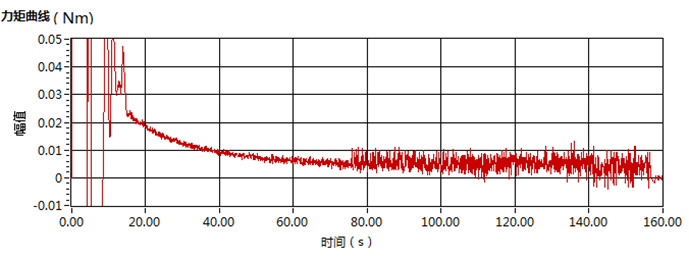
采用误差放大技术,构建国产化化FPGA超高精度伺服电机控制技术,实现多模式输出(速率模式、力矩模式),在±5000r/min宽范围下,速度控制(误差±0.1r/min)与力矩控制(误差<0.01Nm),相较行业主流方案精度提高一个数量级以上。
新型集中式电子电气架构
团队成员创新性地在国内首次构建了软件定义汽车框架,是我国软件定义汽车领域前沿性研究成果,入选2021年中国科协百篇优秀科技论文(车辆工程领域代表)。
针对传统汽车电气架构的不足,结合车载以太网技术等汽车通信技术的最新成果,提出了面向人机交互系统的区域型电气架构,实现了车内与车外环境的双向交互,改善了交通安全性,提高了人机可交互性,可满足娱乐、会议等多种服务场景。
该架构融合了车内网与车外网,引入高性能的中央处理器,进行主要数据处理、子系统协调及任务决策,提升硬件整合度与拓展性,极大地提升了通信带宽与信息安全;相比于传统汽车电气架构,线束回路数、长度、重量、成本以及平均线径均有所降低。
超高精度伺服电机控制技术
伺服电机力矩输出曲线

智能汽车新型集中式电子电气研究架构示意


辅助自动驾驶传感器优化布置方案

智驾传感器自动化最优布局方案

采用粒子群优化的车辆线束布局优化


多车协同控制系统

提出了货物姿态控制任务递归分解的高精度多车协同控制,最小化应力损伤的优化控制机制,针对多源不确定性研究自适应稳定控制方法,采用仿生蚁群搬大件的方式对多辆相对独立车辆进行协同精准控制。

分布式电驱动多体系统逆动力学分解示意

约束动力学模型
创新性的提出车辆系统层级式动力学模型。基于层级约束式解析动力学模型构建层级式逆动力学解析模型。将整车决策目标分解为各执行器的期望输入,通过对各执行器的解析控制,以满足智能车辆决策的目标。



